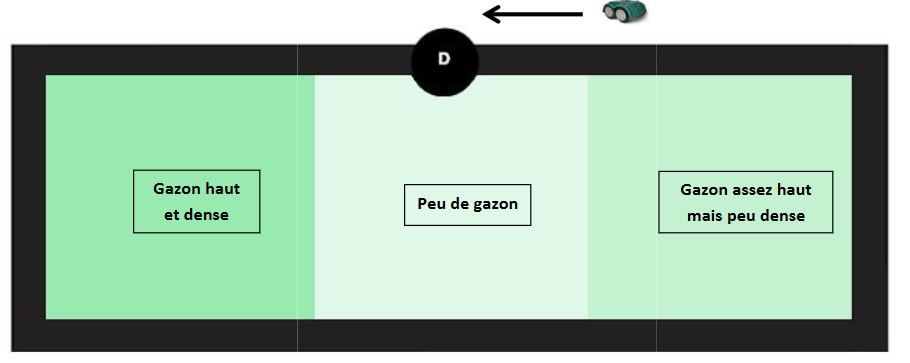
A l'aide de l'Ozobot, nous allons simuler la tonte du périmètre uniquement du jardin suivant :
Posez l'Ozobot sur le point de départ, puis activez le en appuyant sur le bouton situé sur son côté.
Décrivez son fonctionnement en précisant la nature (le type) de ses mouvements et sa vitesse, le long de son trajet.
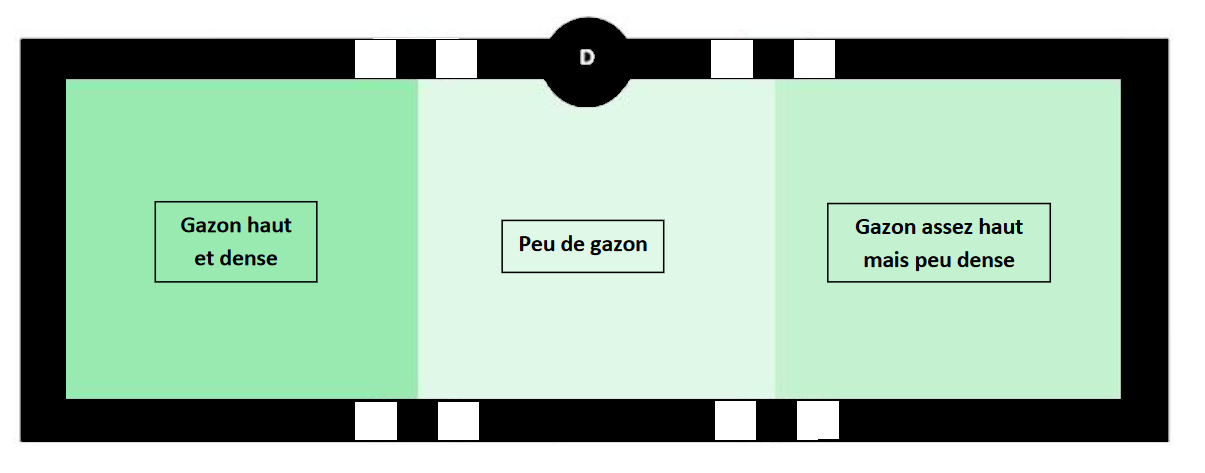
Après essais avec une vraie tondeuse dans le jardin correspondant, nous constatons que le résultat de la tonte n'est pas bon car la tondeuse ne s'adapte pas au gazon rencontré.
Que pourrait-on faire varier sur cette tondeuse en fonction de la densité et de la hauteur de la pelouse, pour avoir une tonte de meilleure qualité ? Justifiez votre réponse.
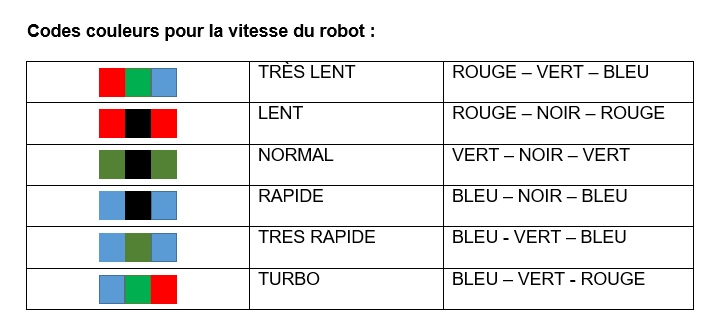
A l'aide du « code couleurs » ci-contre, proposez une solution et testez-la sur le plan fourni. Quand votre solution vous parait correcte, présentez la au professeur.
Quel type de langage avons-nous utiliser pour transmettre des ordres, des informations à l'Ozobot ?
Qu'est-ce qu'un langage ? Donnez des exemples.
Quel type de signal utilise ce langage ? Connaissez-vous d'autres types de signaux, permettant de communiquer (transmettre des informations) ? Lesquels ?

Nom :