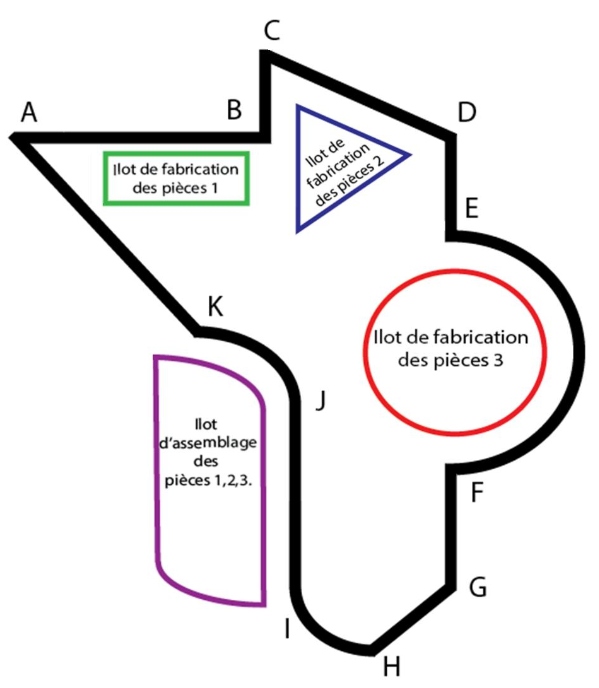
Dans l'atelier de production ci-contre, le robot suiveur de ligne a pour rôle de récupérer des pièces dans les îlots de fabrication 1, 2, 3 et de les transporter dans l'îlot d'assemblage. Il va être amené à se déplacer en mouvement rectiligne ou circulaire.
A l'aide d'Internet, trouvez les définitions simples des termes suivants :
Rectiligne :
Circulaire :
Posez l'Ozobot sur le point de départ (A) du plan de l'atelier de production qui t'es fourni. Activez l'Ozobot en appuyant sur le bouton situé sur son côté.
Observez les déplacements de l'objet technique et indiquez la nature de ces mouvements pour chacun des tronçons du circuit.
Complétez le tableau par une croix.
Déplacement | Mouvement rectiligne | Mouvement circulaire |
Entre les points A et B | ||
Entre les points B et C | ||
Entre les points C et D | ||
Entre les points D et E | ||
Entre les points E et F | ||
Entre les points F et G | ||
Entre les points G et H | ||
Entre les points H et I | ||
Entre les points I et J | ||
Entre les points J et K | ||
Entre les points K et A |
Dessinez au feutre sur une 1/2 feuille A4 (épaisseur des traits : 5 mm environ) un circuit fermé qui obligera l'Ozobot à effectuer 2 mouvements circulaires et 2 rectilignes. Testez votre circuit avec l'Ozobot.
Collez votre circuit.

Nom :