Pour se déplacer dans la jungle hostile votre robot va devoir apprendre les mouvements de base, et pour cela vous allez l'aider. Vous devrez donc lui apprendre à aller tout droit en variant sa vitesse, tourner à droite, à gauche en jouant sur les paramètres de rotation, s'arrêter et reculer.
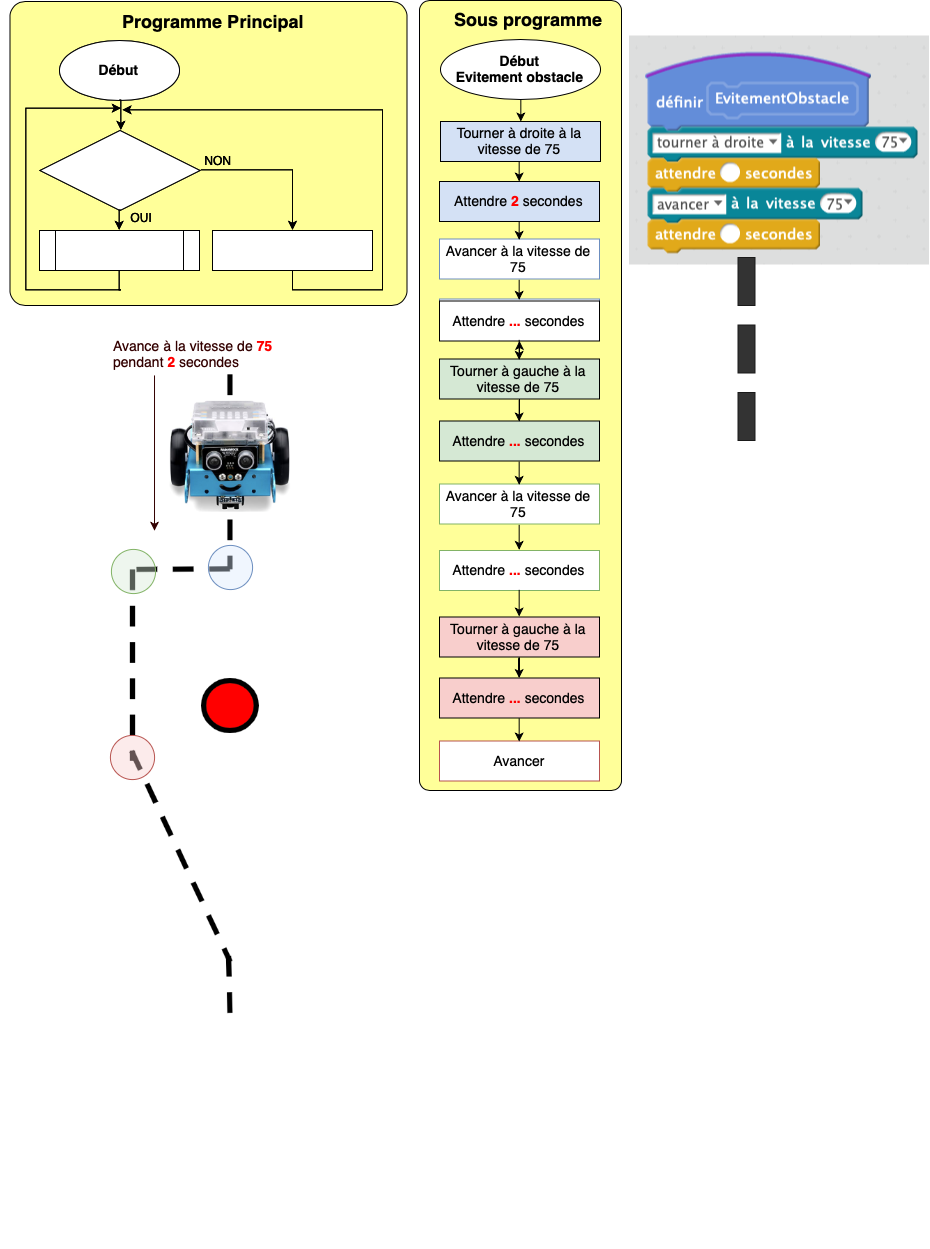
L'image ci-contre vous montre le parcours pour éviter un obstacle en le contournant, pour cela votre robot devra avancer, changer de direction etc. Sur l'image vous retrouverez l'algorigramme du déplacement pour éviter l'obstacle ainsi qu'une partie du programme Mblock.
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger la vidéo.
A partir de l'application Draw.io, ouvrez le fichier " Evitement_obstacle.xml ", qui se trouve dans l'espace « Public » de votre classe. Pensez à enregistrer le fichier dans votre espace de travail personnel.
Compléter l'organigramme du programme principal permettant l'évitement d'un obstacle.
Donnez un titre à votre fichier puis sauvegardez le travail au format PNG (Fichier - Exporter en tant que) et imprimez le, pour le coller sur votre feuille.
Sur l'application MBlock, ouvrez le fichier " Contourner_obstacle.mbot " puis, en vous servant de la vidéo “Création sous-programme”, construire le programme d'évitement en vous servant de l'algorigramme et des éléments donnés.
Calibrez provisoirement les vitesses manquantes à 75 % de la puissance et les temps d'attente à 2s (fonction “attendre ... secondes”).
Programmez (téléversez le programme) le MBot, observez les déplacements et constater les défauts.
Corrigez alors les valeurs du programme afin que le robot contourne un obstacle en respectant les angles droits et les distances données.
ENREGISTREZ VOTRE PROGRAMME D’ÉVITEMENT, il vous servira pour l'activité N°1 de la séquence 4
Faites une capture d'écran de votre programme, au format PNG, il faudra l'intégrer à votre PréAO et imprimez le, pour le coller sur votre feuille.